
Introduction
First sighting of the Martian moons, Deimos and Phobos, was reported in 1877 by Asaph Hall, an astronomer of the Naval Observatory in Washington. The increasing interest in Phobos, the larger of the two Martian moons, is not only due to the steadily increasing number of space based and earth based observations but also to its low orbit about Mars. Its motion and rotation are thus effected by the Martian gravity field and variation may lead to further clues of its origin and evolution. Furthermore, Phobos was identified as potential target for sample return missions by different mission planning groups.
The German Aerospace Center (DLR) was involved in an in-depth study of this natural satellite. Based on images of the multi-spectral line scanning High Resolution Stereo Camera (HRSC) and the Super Resolution Channel (SRC) – a frame camera – the department of Planetary Geodesy
Phobos is a very irregular body (Fig. 1) often approximated by a tri-axial ellipsoid for simplicity (Batson et al., 1992). With a mean distance of only 9375 km to the center of Mars – which relates to approximately 6000 km above the Martian surface – it is orbiting deep in the Martian gravity field. Its orbit is in a nearly equatorial plane and almost circular.

Facts
| Property | Value |
| Mean Distance to Mars | 9375 km |
| Radii a | 13.0 x 11.39 x 9.07 km |
| GM b | 0.0007158 ± 0.0000005 km3/sec2 |
| Orbital period | 7 h 39 min 14 sec |
| Eccentricity e | 0.01515 |
| Mean velocity (absolute) | 2.14 km/sec |
| Mean velocity w.r.t. Mars | 1.47 km/sec |
| Inclination i referred to Mars equator | 1.075° |
a Willner et al., 2009
b Konopliv et al., 2006
Image Data

The HRSC and SRC are instruments on board the European Mars Express mission. The spacecraft is in a highly elliptical nearly polar orbit about Mars with an apoapsis height of about 11,000 km above the planets surface, reaching well beyond the orbit of Phobos. Hence, regular flyby observations are possible through both instruments. At flyby distances below 1000 km it is anticipated to obtain stereo information through the multiple channels of the HRSC (see www.dlr.de/mars/en/Desktopdefault.aspx/tabid-290/944_read-1409/ (or the description on europlanet.dlr.de/HRSC) for an introduction on the HRSC camera). An example of a flyby sequence obtained by the HRSC is shown in Fig. 2. The SRC acts as a magnifying glass compared to the HRSC as it has an almost 6 times larger focal length compared to the HRSC leading to a magnification factor of approximately 4.3. During a flyby the SRC obtains 8 images. Fig 3. depicts examples of SRC images from different flybys.

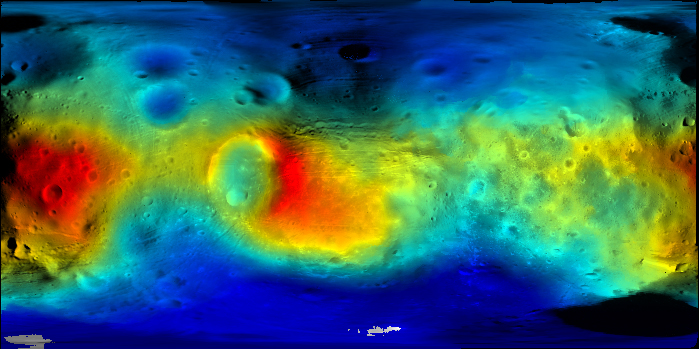
Digital Terrain Model
HRSC images were used to obtain 3-dimensional coordinates of surface points of Phobos. As currently the HRSC could not gain global coverage yet, the data was complimented by Viking orbiter image data to be able to provide the digital terrain model globally. (Willner et al., 2008, 2009)
Mosaic and Map
26 SRC images and 8 Viking images were used to produce a global mosaic in a resolution of 16 pixel/ degree. This global mosaic was processed to form three map sheets, which were combined into a complete Phobos atlas in a scale of 1: 50,000. The printed map sheets have the size of 1000 mm in width by 800 mm in height showing contour lines and the nomenclature of surface features. The north/south pole maps were named "Grildrig" and "Hall", respectively, according to the largest surface features that are depicted. Likewise, the second sheet is named "Stickney", centered at 0° latitude, 90° West longitude and sheet 3 is called "Roche centered at 0° latitude, 270° West longitude. The Viking team chose the names of the surface features on Phobos after scientists involved in the discovery, dynamics, or properties of the Martian satellites, as well as people and places from Jonathan Swift's "Gulliver's Travels" [http://planetarynames.wr.usgs.gov/].
Further readings
Mars Express is continuing its mission, and further Phobos flybys and acquisition of more
high-resolution image data are planned. It is anticipated to further improve and update the terrain model, the preliminary image mosaics, and maps with more image data available.
Downloads
| Data set: DTM and mosaic PDS format |
Data set: DTM and mosaic Tiff/Jpeg format |
Updated | Version |
| base_dtm_phobos.pds | DTM_MAP_colour_coded.jpg DTM_MAP_colour_coded_legend.jpg |
01. June 2009 | 0.1 |
| base_map_phobos.pds | base_map_phobos.tif | 01. June 2009 | 0.1 |
| Data set: PDF format |
Data set: Mosaics Tiff format |
Updated | Version |
| Mercator1.pdf | merc1.tif | 01. June 2009 | 0.1 |
| Mercator2.pdf | merc2.tif | 01. June 2009 | 0.1 |
| Stereographic_1_2.pdf | stereo1.tif stereo2.tif |
01. June 2009 | 0.1 |
Acknowledgement
The research leading to the data products has received funding from the European Community's Seventh Framework Programme ([FP7/2007-2013]) under grant agreement n° 263466 for the FP7-ESPaCE program.
Last update: 28/01/2015 08:43
{kind=link}
{kind=link}